使用 STM32CubeMX 初始化建立專案
NUCLEO-F767ZI 開發板學習
📌 一、 前言
由於 STM32 支援的外設(Peripherals)種類繁多,且不同型號間的硬體配置也存在差異,有一定的開發門檻。雖然意法半導體 (STMicroelectronics) 提供了 HAL 庫,讓開發者能以高階(High Level) API 開發應用功能,但對初學者而言,初期手動建立專案與配置暫存器仍具挑戰性。
透過 STM32CubeMX,我們可以直接在圖形化介面(GUI)中完成引腳與時鐘配置,並自動生成初始化程式碼。這不僅是目前官方推薦的開發方式,也是新手入門最直覺、方便的首選。
🔧 二、 實驗環境與工具
- 開發板: STM32 NUCLEO-F767ZI Board
- 核心 MCU: STM32F767ZI (STM32F7 系列)
- 開發工具:STM32CubeMX
- 輔助工具: 24Mhz 8CH 邏輯分析儀(用於驗證 GPIO 和輸出的通訊訊號)
🚀 三、 CubeMX 專案啟動配置步驟
1. 選擇開發平台
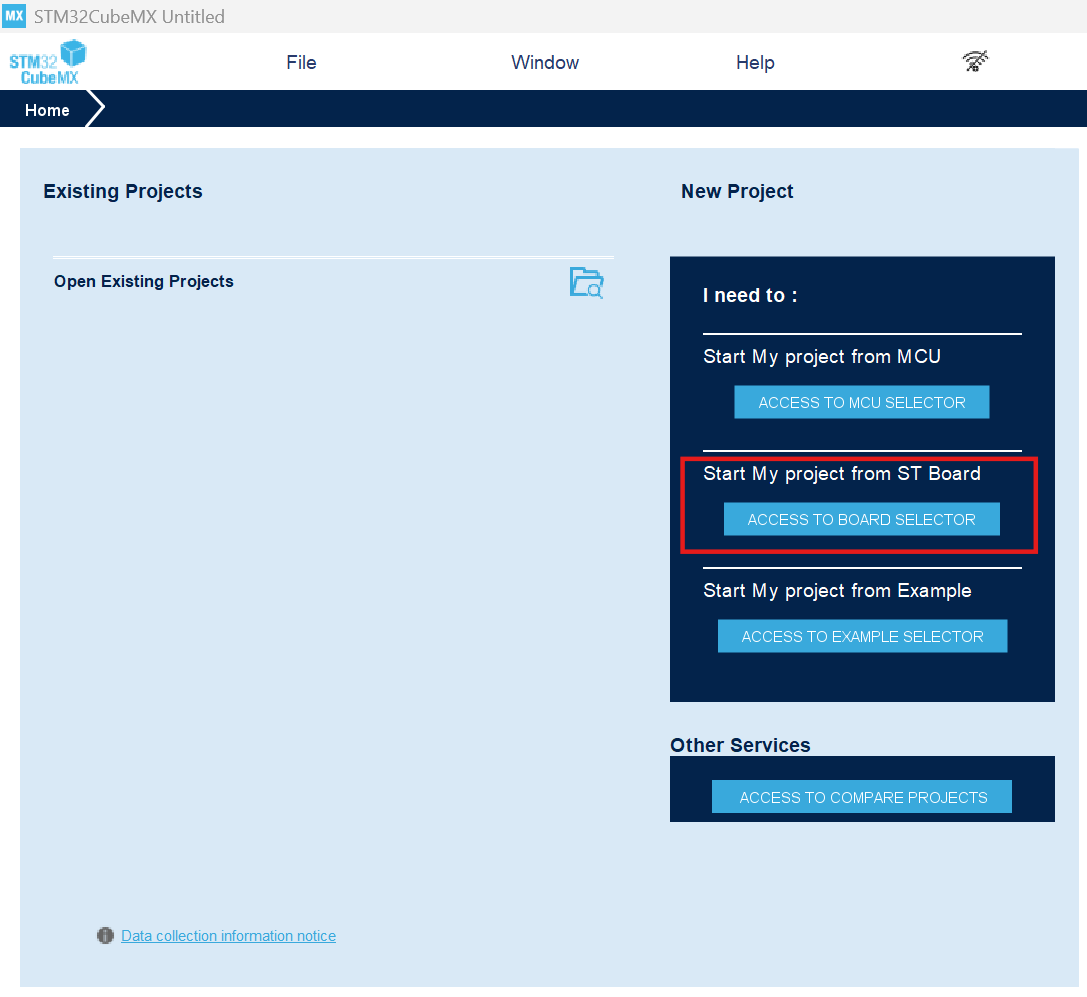
在啟動畫面中,我們選擇 「Access to Board Selector」(或 Start My project from ST Board)。對於使用官方開發板的使用者來說,這能自動幫我們定義好板載的 LED、按鈕與調試接口(ST-Link)。
2. 搜尋與確認型號
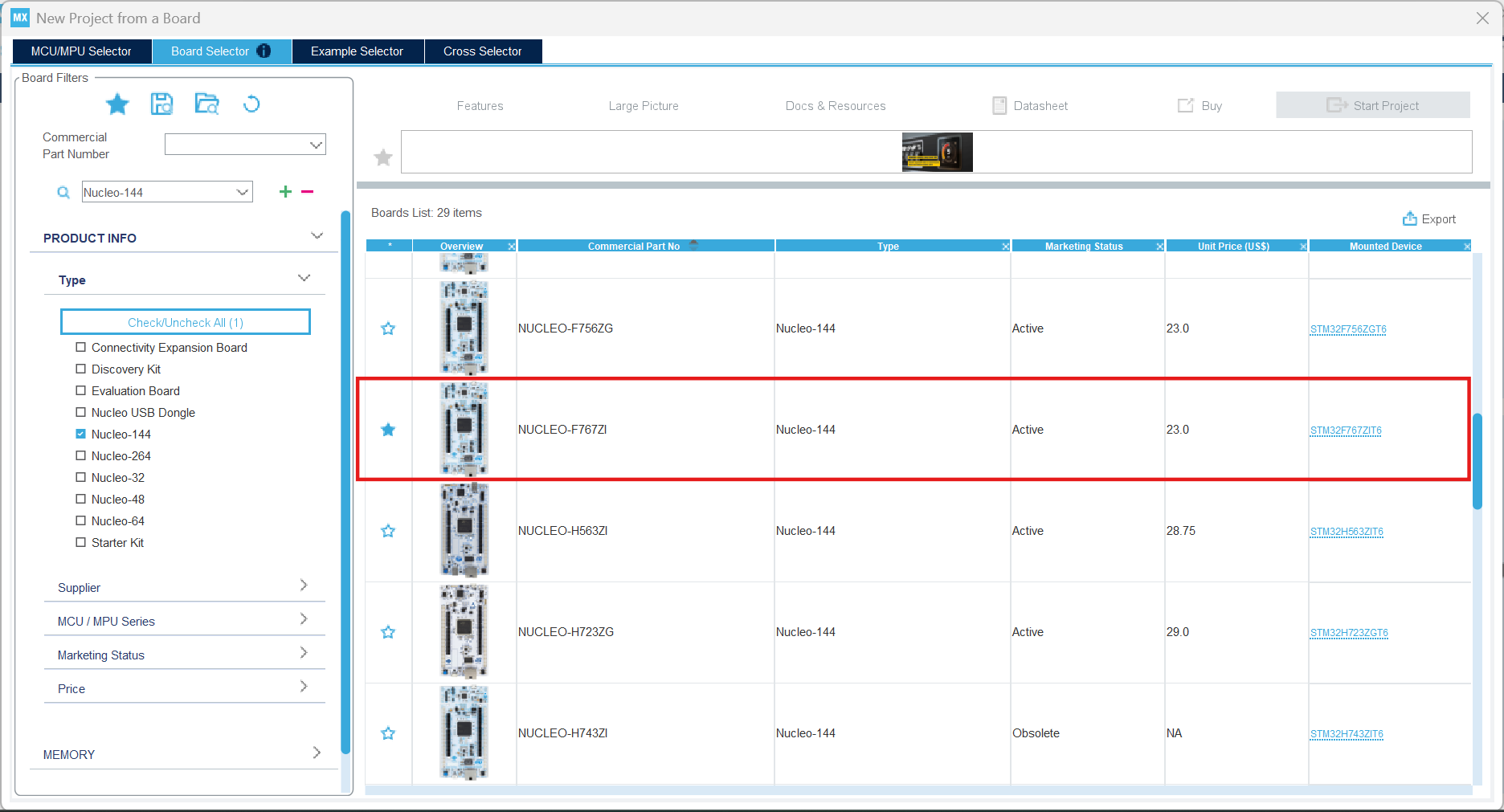
在跳出的搜尋介面中,選擇 NUCLEO-F767ZI。選定後點擊右上角的 Start Project。
3. 初始化外設設定
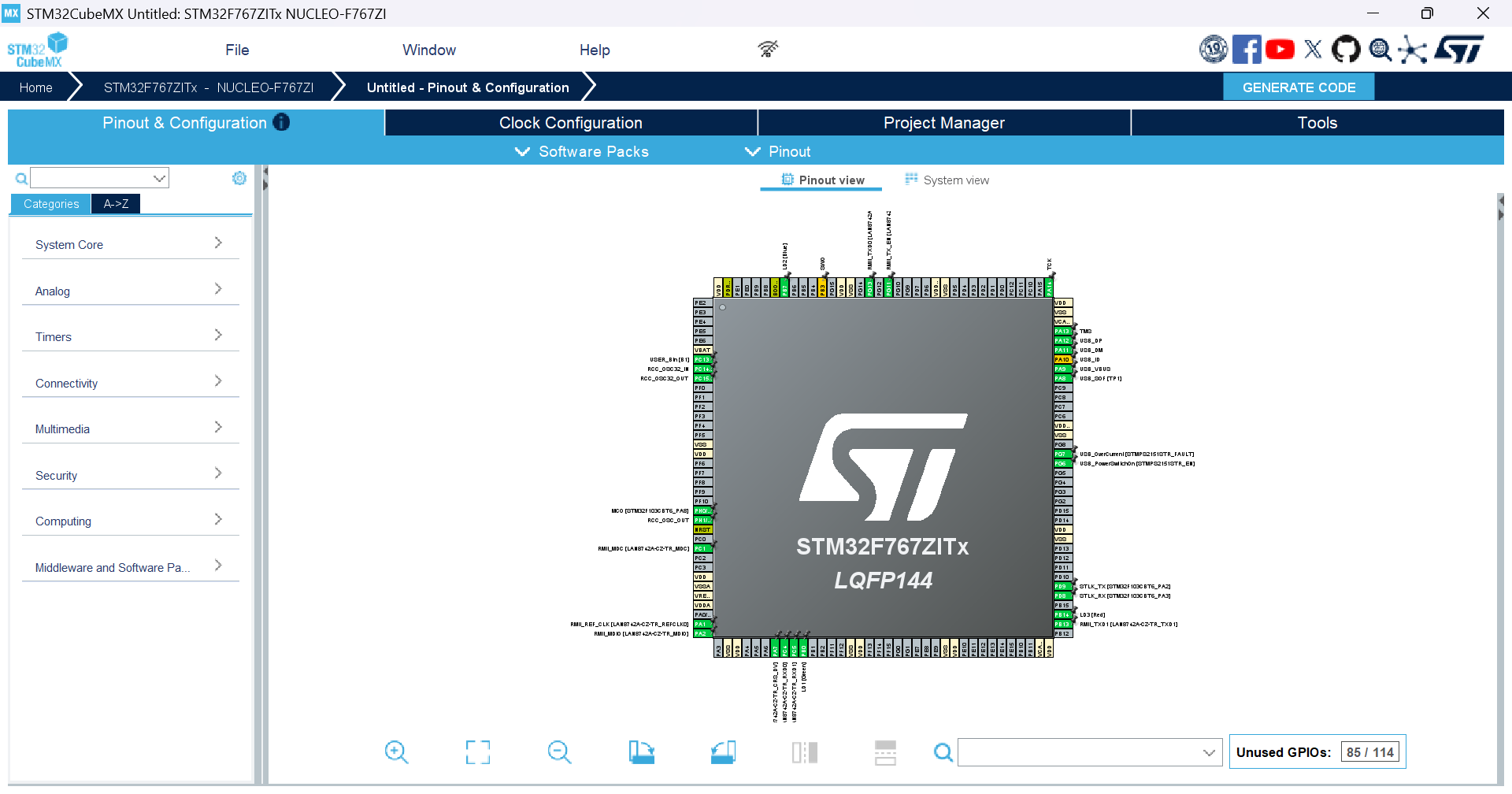
系統會詢問是否要「Initialize all peripherals with their default Mode?」,點選 Yes。 進入主畫面後,我們就可以開始進行 Pinout & Configuration(引腳配置)與 Clock Configuration(時鐘樹設定)了!
🛠️ 四、 外設選擇與設定 (Pinout & Configuration)
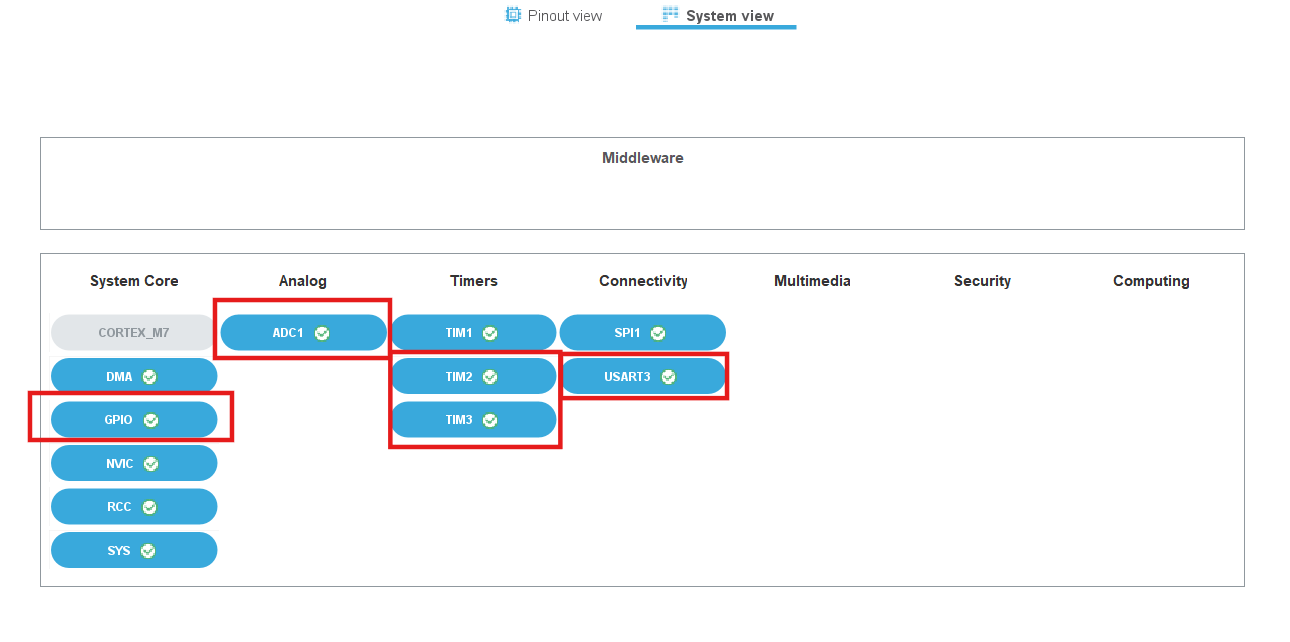
在下面範例中,我們將配置 GPIO、ADC1、TIM2 & TIM3、USART3 等外設。
1. LED 燈與 GPIO 配置
查看 UM1974 User Manual 的第 7.5 節,確認板載 LED (LD1, LD2, LD3) 所連接的 Pin 腳。
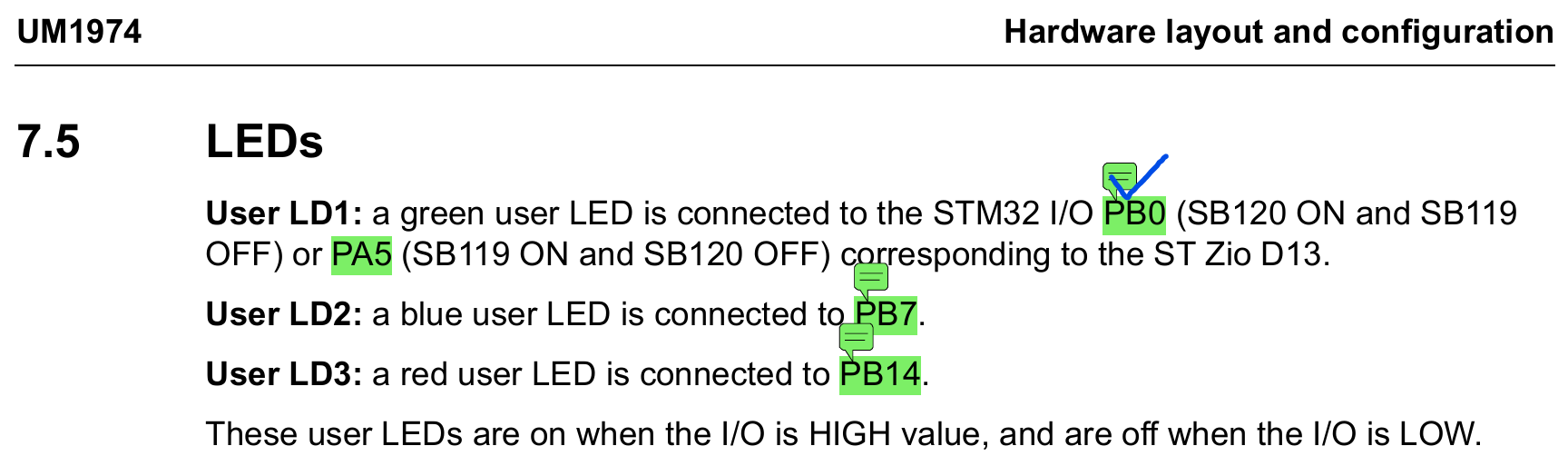
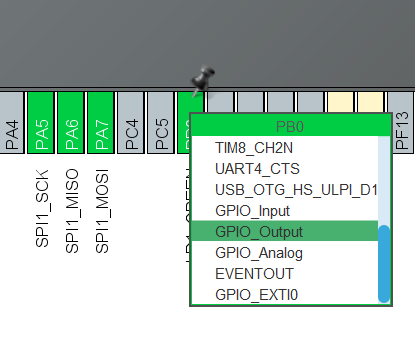
根據文件說明,我們在 STM32CubeMX 的 Pinout View 中進行以下設定:
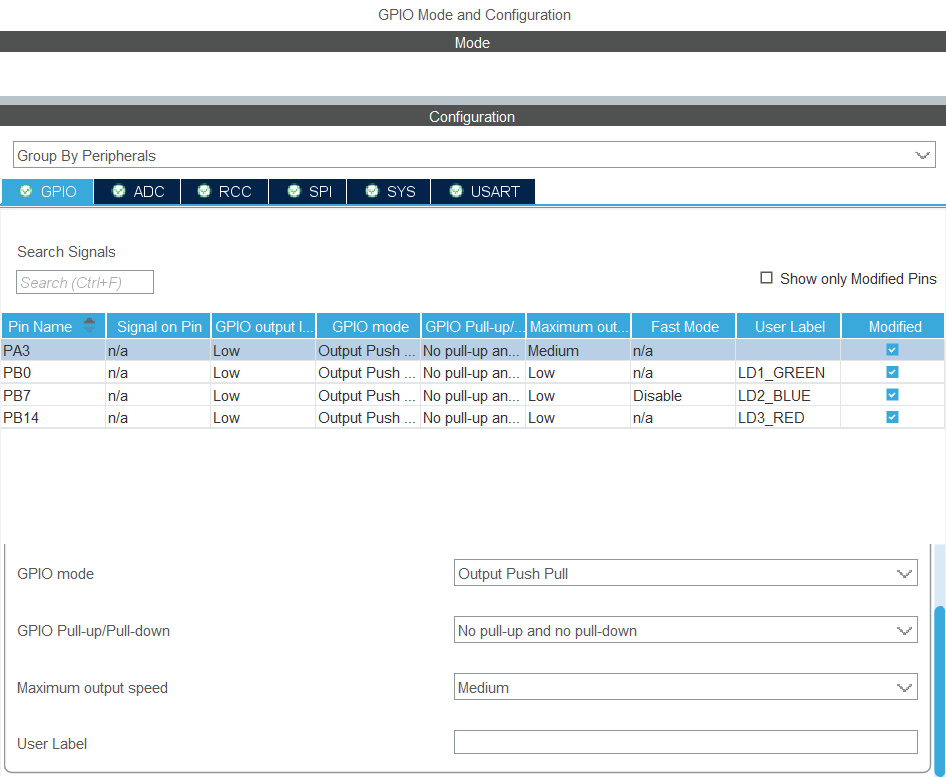
- PB0:設定為
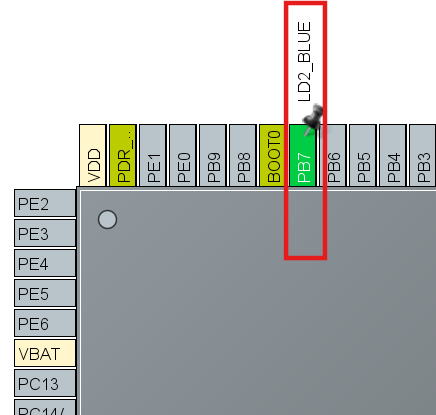
GPIO_Output(LD1_GREEN) - PB7:設定為
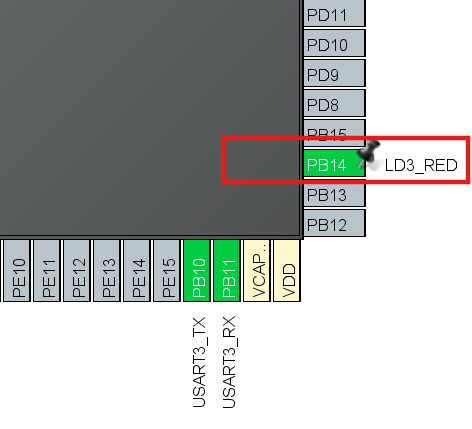
GPIO_Output(LD2_BLUE) - PB14:設定為
GPIO_Output(LD3_RED)
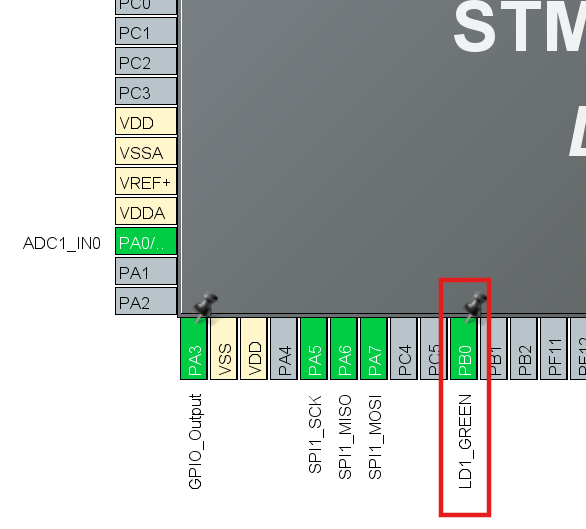
💡 使用 User Label 的好處
在引腳上點擊右鍵選擇 “Enter User Label”,可以為該引腳命名(如 LD1_GREEN)。這樣在自動生成的程式碼中,HAL 庫會自動產生的宏(Macro)定義 Port & Pin,這能大幅提高程式碼的可讀性。
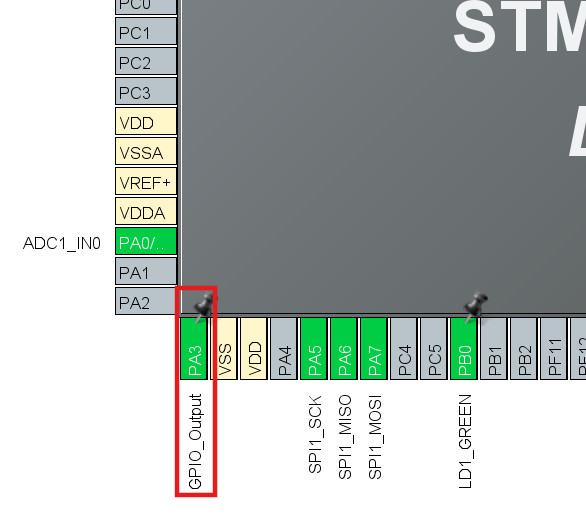
2. Debug 輔助腳位設定 (PA3)
為了後續方便使用 邏輯分析儀 進行調試,我們順手將 PA3 也設定為 GPIO_Output 模式。
此腳位的預期用途:
- 訊號觸發 (Trigger):當程式進入特定中斷或 Function 時,將 PA3 拉高,作為邏輯分析儀的觸發訊號。
- 頻率量測:透過在迴圈中翻轉(Toggle)此腳位,測量程式執行的實際循環頻率或者是使用 TIM 延遲的時間符不符合預期。
- 軟體模擬 (Bit-banging):透過軟體快速切換IO輸出電位,模擬簡單的通訊協定或時鐘訊號。
GPIO Speed 設定 應上述對於高頻翻轉的需求,我們將 PA3 的 Maximum output speed 調升至 Medium。
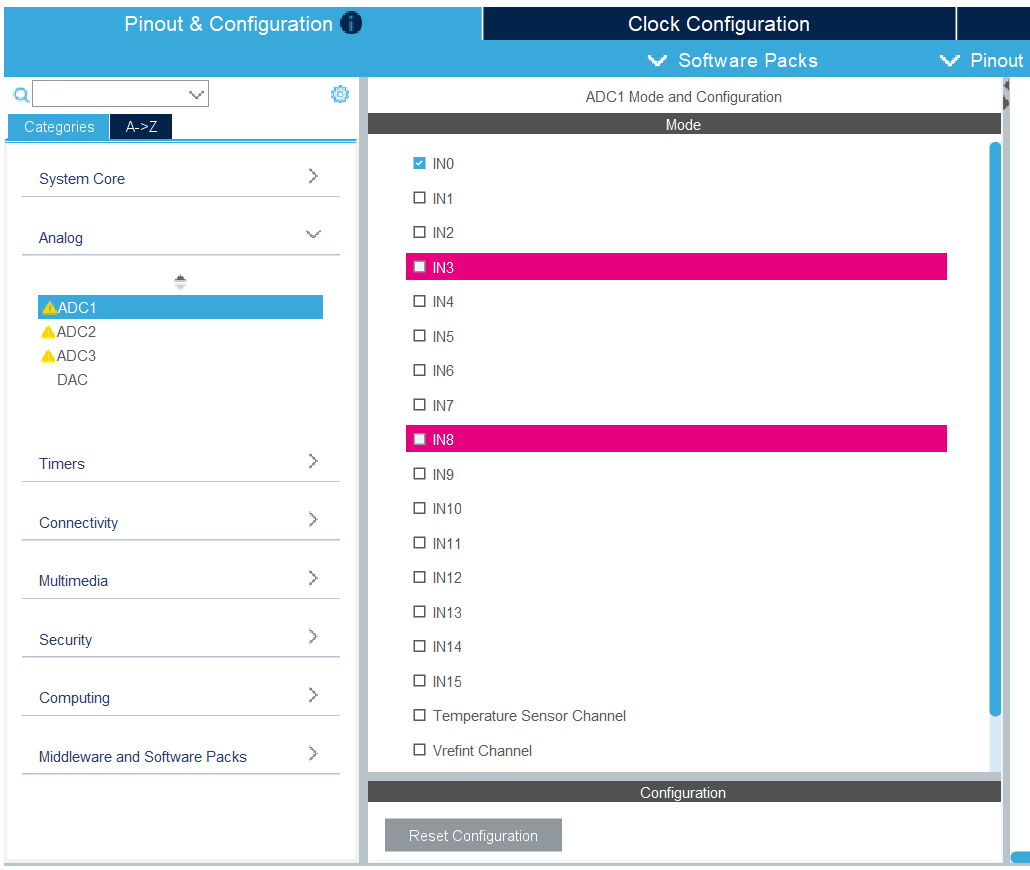
3. ADC 單通道設定 (PA0)
我們選擇 ADC1 的 IN0 通道,對應引腳為 PA0。 在 CubeMX 的選單中,若看到欄位標註警告符號或呈現紅色底色,代表該功能與目前已設定的引腳(如 GPIO 或其他外設)存在 腳位衝突(Pin Conflict),配置時應避開這些選項。
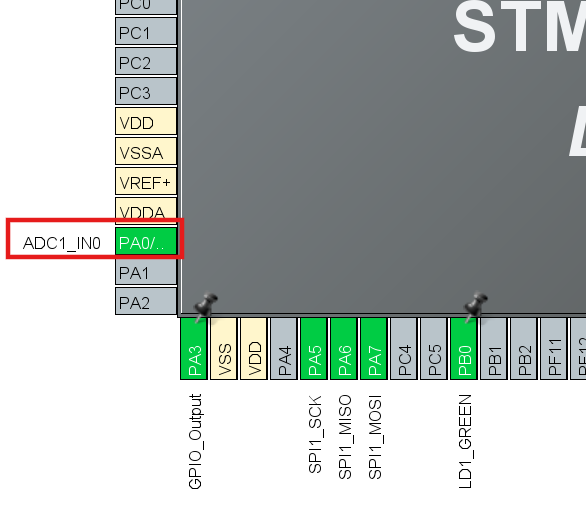
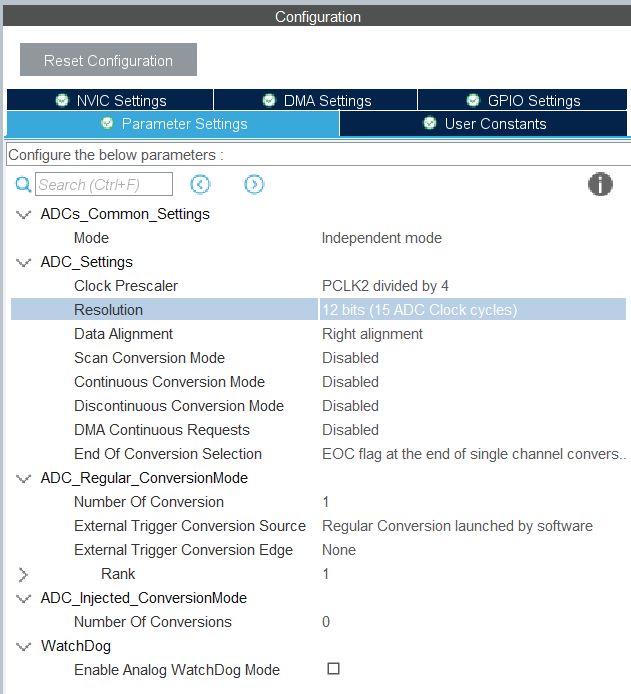
在 Parameter Settings 中,可以看到 Resolution (解析度) 設定為 12 Bits。這是後續撰寫程式時將 ADC 原始數值(0~4095)換算回實際電壓的重要參數。
4. TIM 定時器配置與延時邏輯
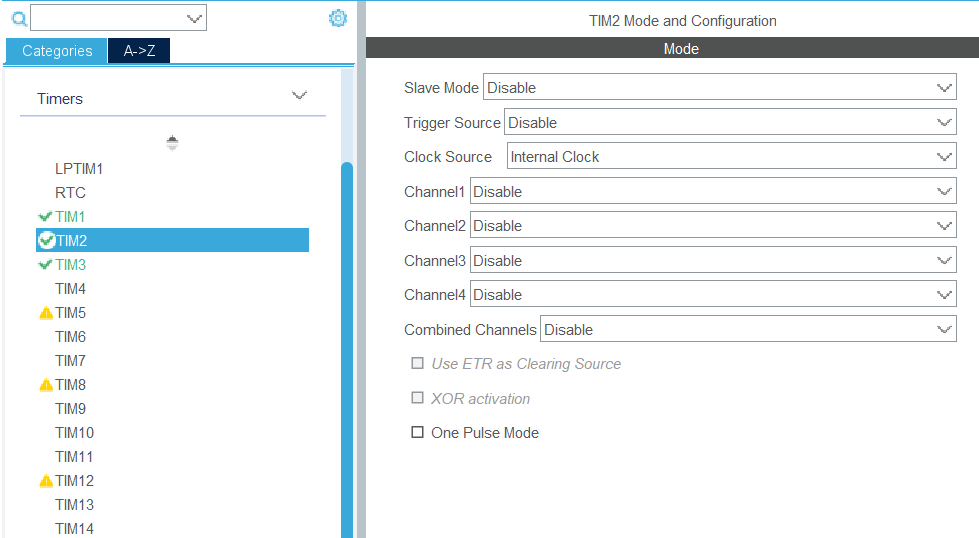
在本專案中,我計畫將 TIM2 作為 ms 級延時計數器,TIM3 作為 us 級延時計數器。
在配置時,請務必將 Clock Source 設定為 Internal Clock;其餘通道(Channels)由於本次不需輸出訊號,保持 Disable 即可。
為什麼選擇 TIM2 做長延時?
查閱 DS11532 Datasheet 的 Figure 2 (Block Diagram) 可以發現:
- TIM2:屬於 32-bit 定時器,擁有更大的
Counter Period(ARR),適合處理長時間跨度的計數。 - TIM3:屬於 16-bit 定時器。
因此,選擇位元數較高的 TIM2 作為
ms延時計數器最為合適。
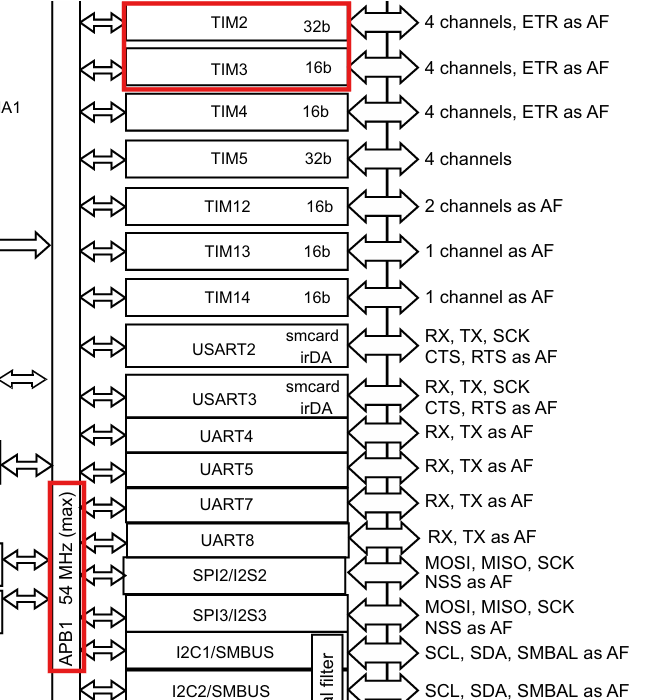
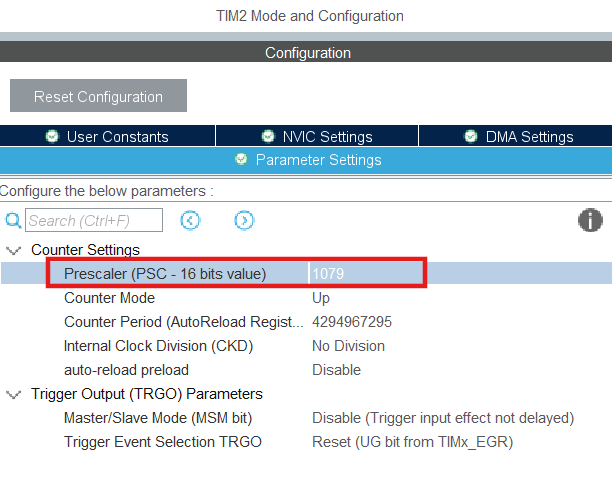
頻率與預分頻器 (PSC) 計算
根據 Datasheet Figure 2 (Block Diagram) 和後續的 Clock Configuration 設定,得知雖然 APB1 匯流排頻率最高為 54MHz,但由於時鐘樹架構,定時器的時鐘輸入(Timer Clock)會經過倍頻,實際運行為 108 MHz。
為了達到精確計數,我們透過預分頻器(Prescaler, PSC)來調整計數頻率(減 1 是因為從 0 開始):
-
TIM2 (10us 計數一次): 公式:\(PSC = \frac{TimerClock}{TargetFrequency} - 1 = \frac{108MHz}{100kHz} - 1 = 1079\)
-
TIM3 (1us 計數一次): 公式:\(PSC = \frac{108MHz}{1MHz} - 1 = 107\)
5. USART3 設定 (非同步通訊與 DMA)
接下來配置序列通訊。我們選用 USART3 並設定為 Asynchronous (非同步) 模式。
考量到未來會實作 DMA (Direct Memory Access),我提前在 DMA Settings 分頁中,將 USART3_TX 與 USART3_RX 加入傳輸通道。
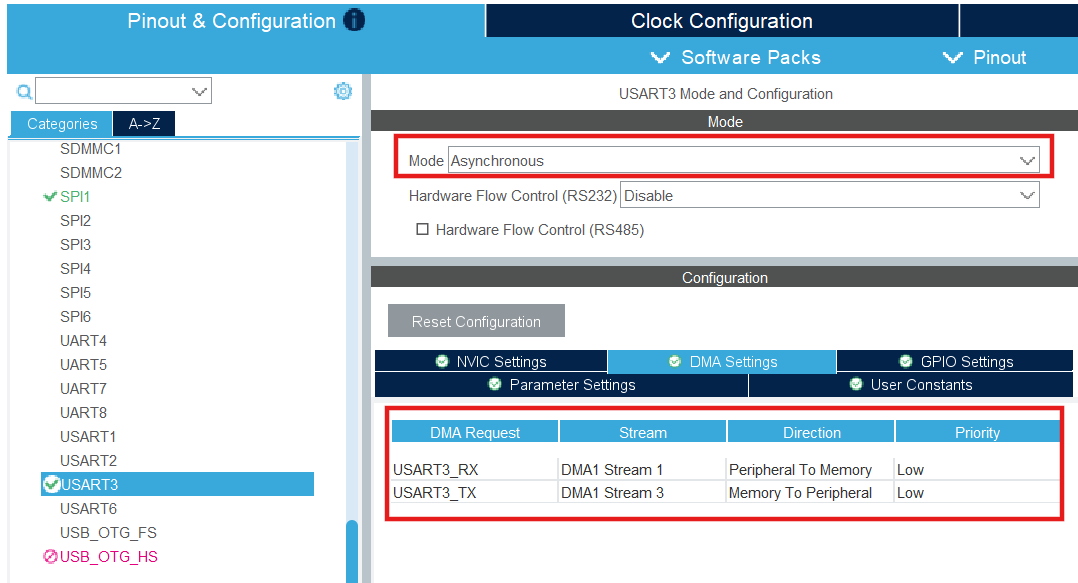
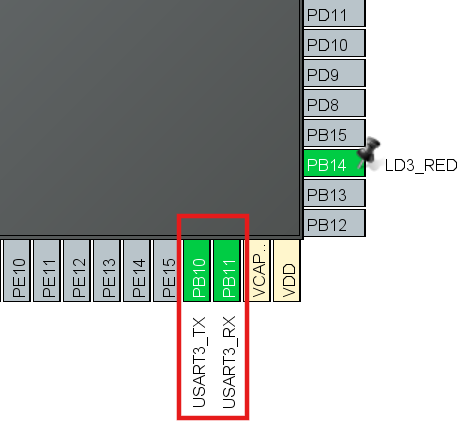
引腳部分,自動配置 PB10 作為 TX,PB11 作為 RX。
6. SYS 設定 與 RCC 設定
在完成特定功能外設設定後,最後我們回頭處理 SYS 與 RCC 的核心配置。
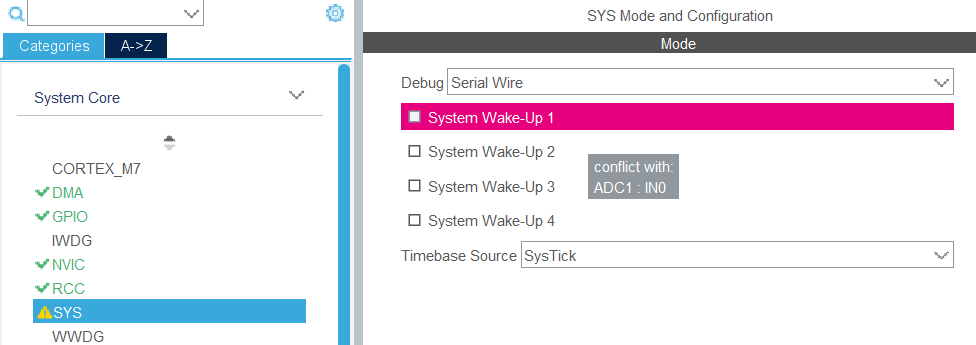
SYS (系統調試)
在 SYS 頁面中,將 Debug 選擇為 Serial Wire。這非常重要,它確保了我們能透過板載的 ST-LINK 進行 SWD 介面的燒錄與除錯。
💡 小觀察:在下方的列表可以看到
System Wake-Up 1標示為紅底。這是因為該功能與我們先前設定的 ADC1_IN0 (PA0) 發生了腳位衝突,CubeMX 會主動阻擋重複分配。
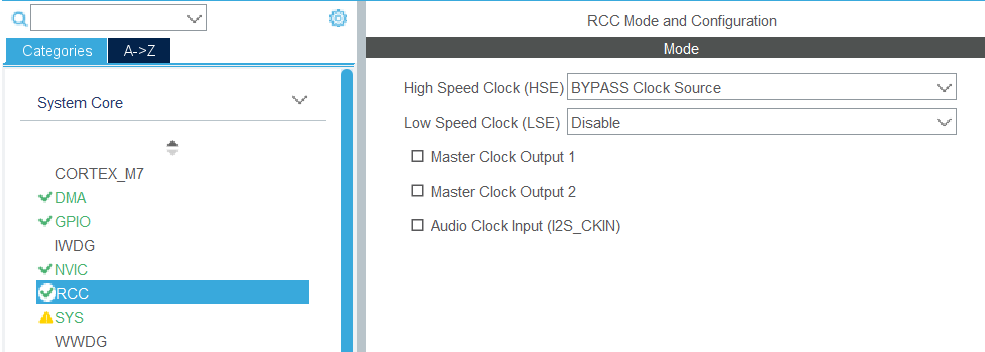
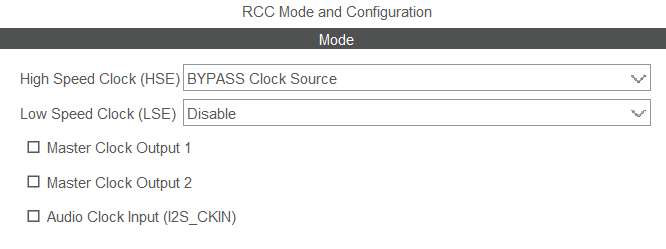
RCC (時鐘源設定)
針對時鐘源,我們選擇使用 HSE (High Speed External)。 參考 UM1974 User Manual 第 7.8.1 節,NUCLEO 板預設是由 ST-LINK 提供一個固定的 8MHz MCO 訊號 給 MCU。
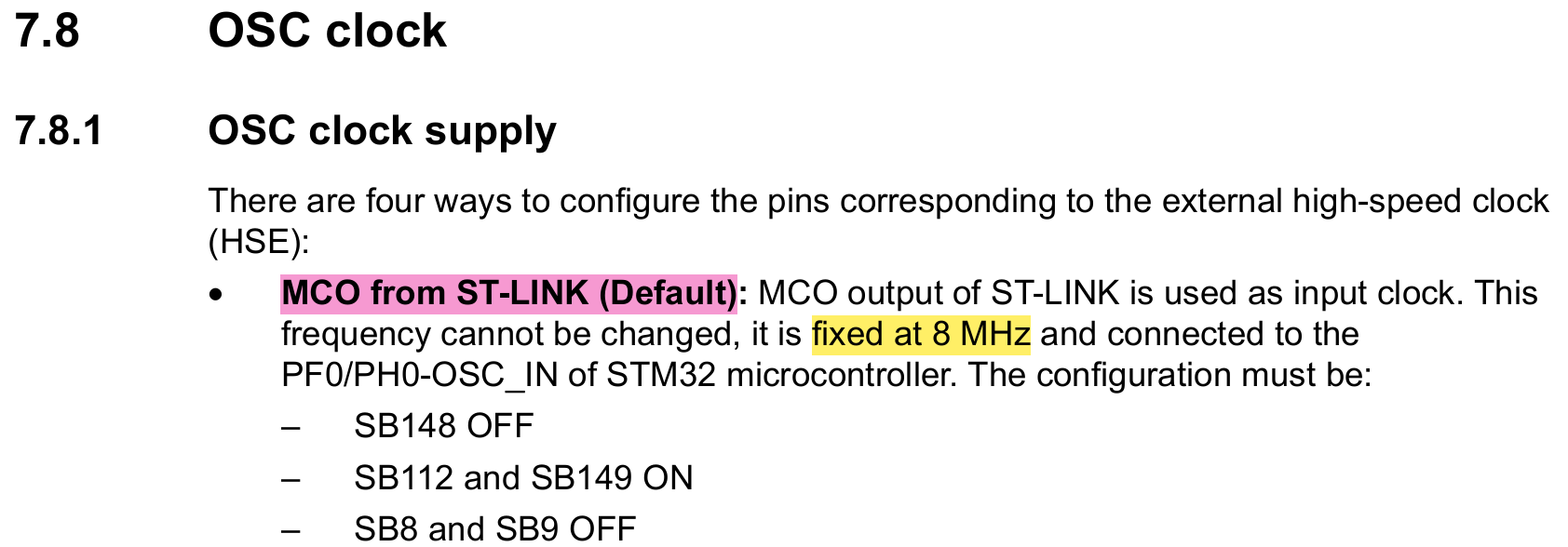
因此,在 RCC 的 HSE 設定中,必須選擇 BYPASS Clock Source。
- Crystal/Ceramic Resonator:適用於外部有接石英晶體/陶瓷諧振器(帶電容)的情況。
- BYPASS Clock Source:適用於外部直接輸入主動式時鐘訊號(如 ST-LINK 的 MCO)。
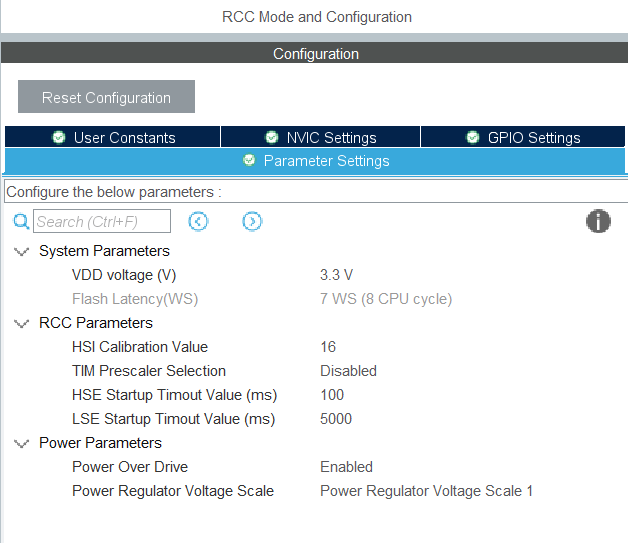
在 Parameter Settings 中維持預設即可,但可留意到系統電壓 VDD 設定為 3.3V。
MCO (Main Clock Output) 與時鐘驗證
為了確保 MCU 接收到的 HSE (外部時鐘源) 確實如手冊所述為 8MHz,我們可以使用 STM32 的 MCO (主時鐘輸出) 功能。透過將內部時鐘訊號除頻後從特定引腳輸出,並搭配 邏輯分析儀 進行觀察,即可驗證時鐘頻率的準確性。
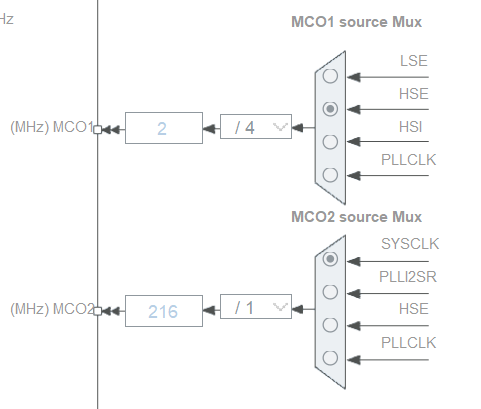
在 CubeMX 的 RCC 配置頁面中,勾選 Master Clock Output 1 (或 2) 即可開啟此功能。開啟後,你可以選擇想要輸出的時鐘源(如 HSE, HSI, PLLCLK 等)以及預分頻係數(Prescaler)。
實測結果分享: 根據實際觀測,HSE 輸出確實為 8MHz,而內部震盪源 HSI 則為 16MHz。
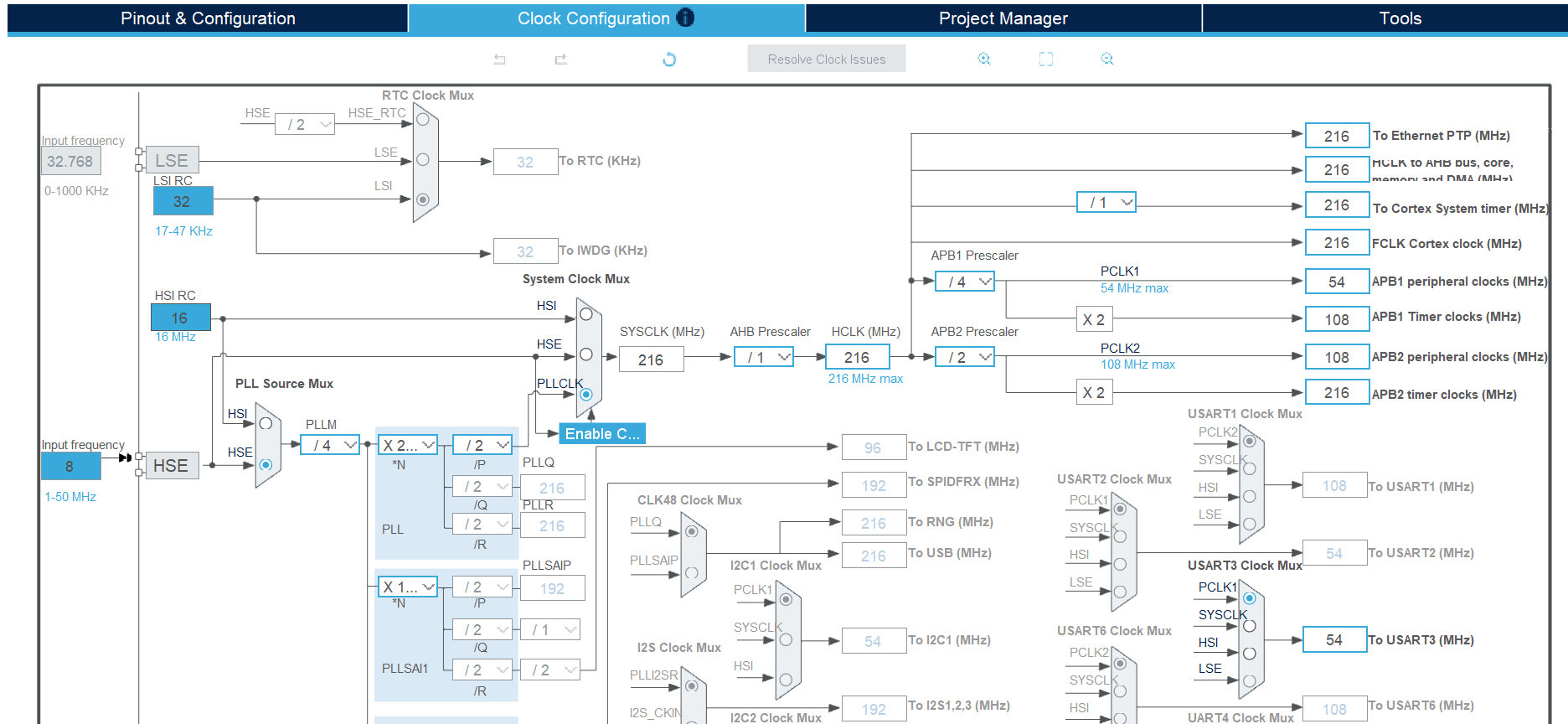
🕒 五、 Clock Configuration (時鐘樹配置)
完成外設設定後,我們進入時鐘樹頁面進行最後調整。由於 STM32F767ZI 的效能強大,我們目標是將系統時鐘(HCLK)推到最高頻率:
- HSE 輸入:確認
Input frequency設定為 8MHz。 - 時鐘源選擇:將
PLL Source Mux切換至 HSE。 - 自動配置小技巧:直接在
HCLK欄位輸入目標頻率 216 (MHz) 並按下 Enter,CubeMX 會自動幫你計算出對應的 除頻與倍頻參數,非常方便。
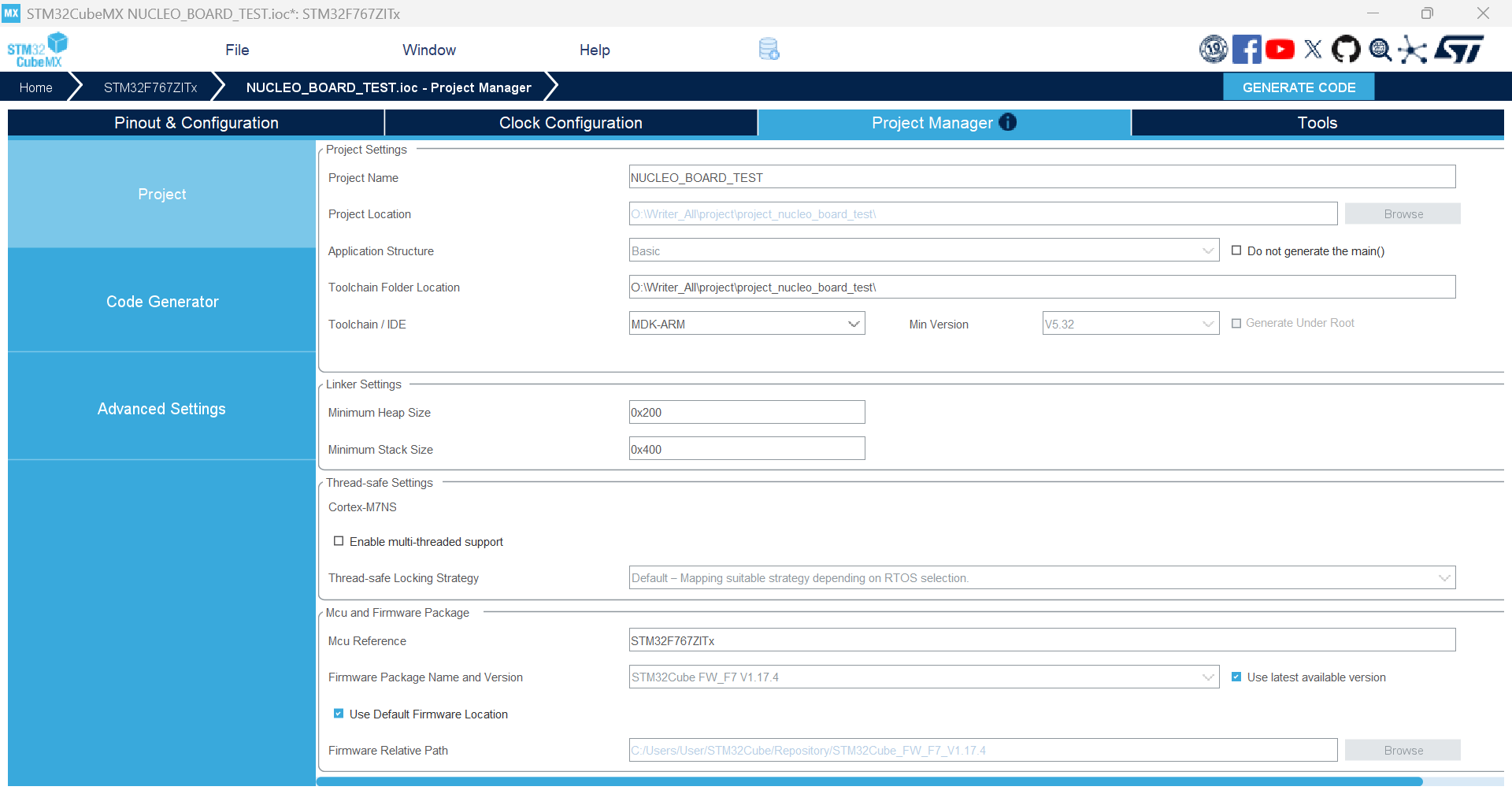
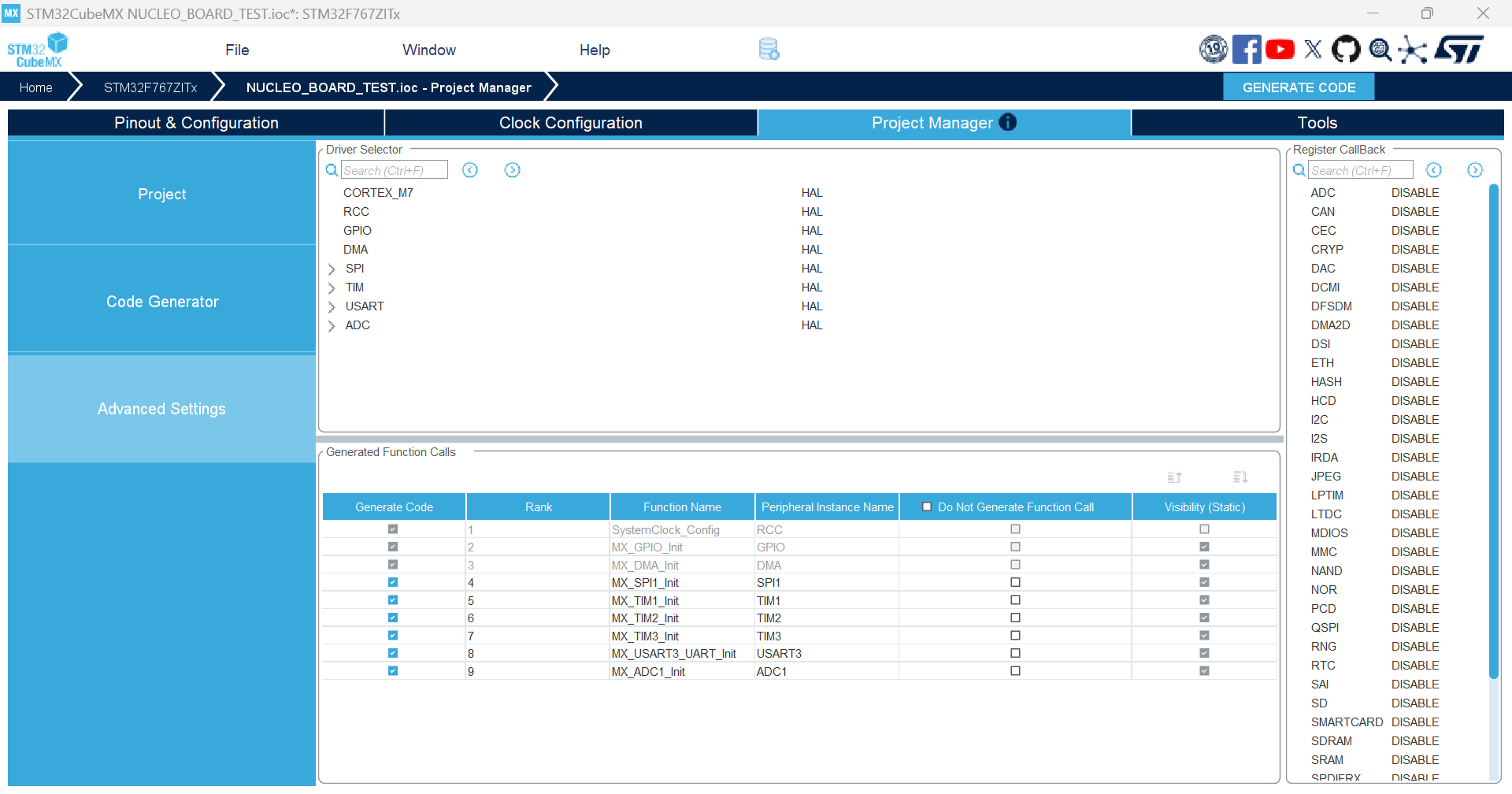
📂 六、 Project Manager (專案管理設定)
對於 Project Manager,這裡的設定由個人需求,下面的範例僅供演示。 實際到這裡設定完成,就可以按下右上角的 GENERATE CODE 按鈕了! 並記得可以儲存成.ioc,之後可以再次開啟並修改。
1. Project 區段
- Project Name: 為專案取個好辨識的名字。
- Toolchain / IDE: 若使用 Keil 則選擇 MDK-ARM。
2. Code Generator 區段
- Copy only the necessary library files: 勾選此項可以讓專案資料夾更精簡,僅包含用到的 HAL 庫檔案。
- Generate peripheral initialization as a pair of ‘.c/.h’ files per peripheral: 強烈建議勾選。這會將 GPIO、ADC 等初始化程式碼分開存放在獨立檔案中,避免
main.c變得過於臃腫。
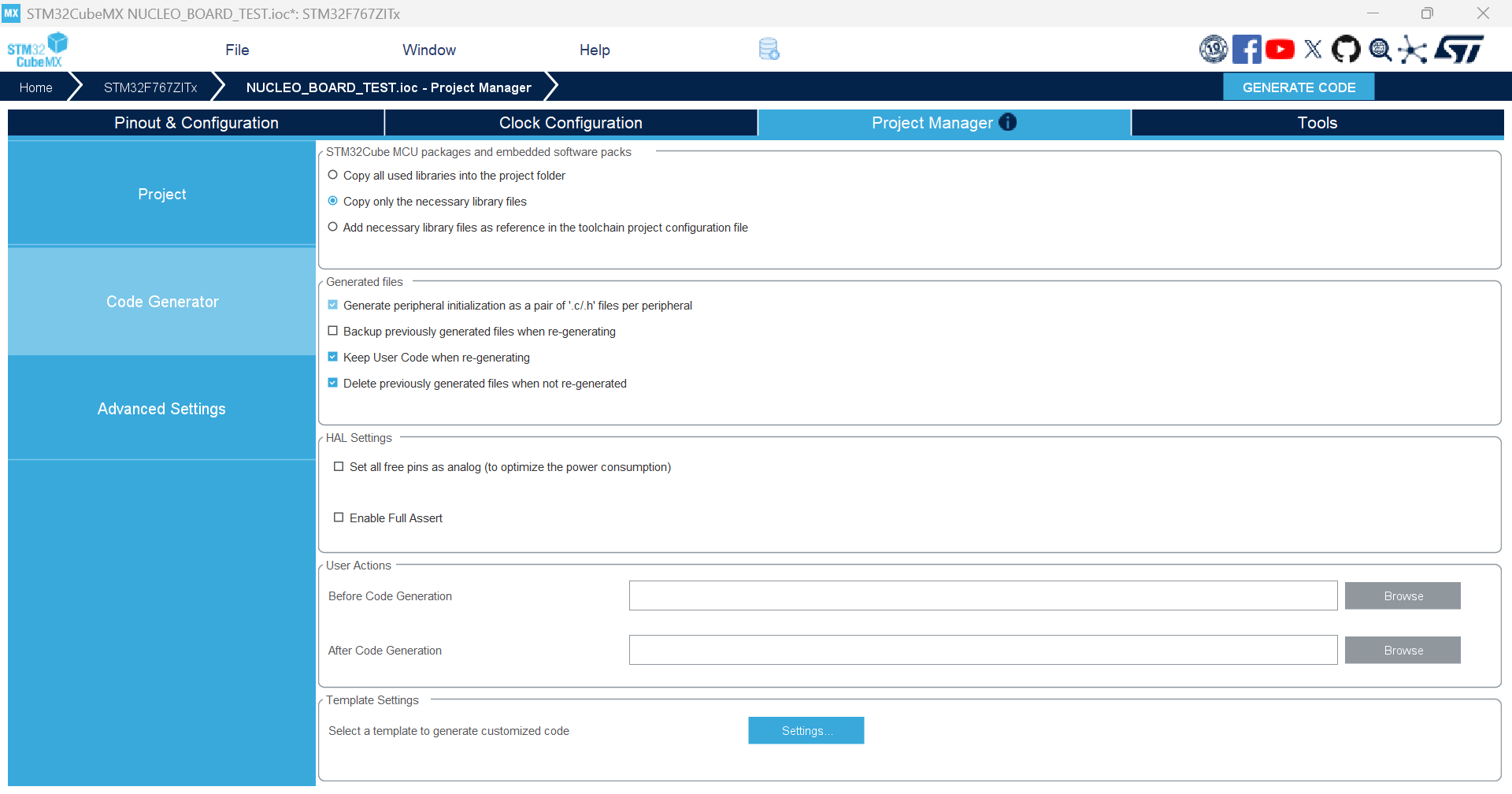
3. Advanced Settings 區段
- 可以單獨設定各Driver使用 HAL 或者 LL,HAL 相對於來說 HAL 更 High Level 設定調整較少,不過編譯出的 code size 也會較大。
🚀 產生程式碼
設定完成後,點擊右上角的 「GENERATE CODE」 按鈕,系統就會自動生成專案框架。
💡 溫馨提示:記得將設定存成
.ioc檔。日後若需要新增外設(例如增加更多的 ADC 通道),只要再次開啟該檔案修改並重新產生 Code 即可,這就是使用 CubeMX 開發的最大優勢。
🧑💻 七、 範例程式以及量測驗證
1. LED 燈閃爍與定時器延時實作
以下提供核心邏輯代碼。請注意,STM32CubeMX 僅負責生成定時器的初始化配置,**必須手動呼叫 HAL_TIM_Base_Start()** 才能正式啟動計數器。
// TIM_MS TIM2 32bit timer for MS delay
#define TM_MS_GET() __HAL_TIM_GET_COUNTER(&htim2)
// TIM_US TIM3 16bit timer for US delay
#define TM_US_GET() __HAL_TIM_GET_COUNTER(&htim3)
void TM_Delay_MS(__IO U16 ms)
{
U32 dly = 100 * ms;
U32 start = TM_MS_GET();
while((U32)(TM_MS_GET() - start) < dly) {
__asm("NOP");
}
}
void TM_Delay_US(__IO U16 us)
{
U16 start = TM_US_GET();
while ((U16)(TM_US_GET() - start) < us) {
__asm("NOP");
}
}
void TM_Init(void)
{
HAL_TIM_Base_Start(&htim2);
HAL_TIM_Base_Start(&htim3);
}
void led_green_toggle(void) {
HAL_GPIO_TogglePin(LD1_GREEN_GPIO_Port, LD1_GREEN_Pin); // PB0
}
void led_blue_toggle(void) {
HAL_GPIO_TogglePin(LD2_BLUE_GPIO_Port, LD2_BLUE_Pin); // PB7
}
void led_red_toggle(void) {
HAL_GPIO_TogglePin(LD3_RED_GPIO_Port, LD3_RED_Pin); // PB14
}
int main(void)
{
// Start TIM2,3
TM_Init();
while (1)
{
U16 delay_ms = 50;
led_green_toggle();
TM_Delay_MS(delay_ms);
led_blue_toggle();
TM_Delay_MS(delay_ms);
led_red_toggle();
TM_Delay_MS(delay_ms);
}
}
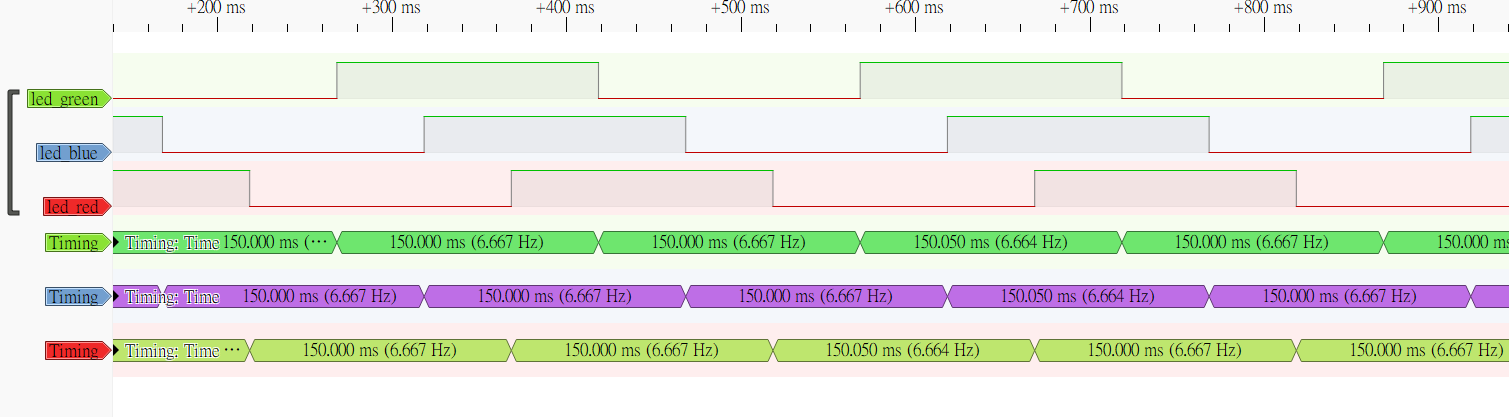
🔍 波形驗證
透過邏輯分析儀觀察 led_toggle 的波形,可以確認三個 LED 翻轉的時間間隔是否精確為 50ms。這也是驗證前面 Clock Configuration 設定是否正確最直觀的方法。
2. ADC 量測電壓與 UART 資料傳輸
在本實作中,我們將讀取 PA0 的類比電壓,並透過 UART3 將結果輸出。同時,利用 PA3 腳位的電位變化,方便透過邏輯分析儀觀察 UART 的傳輸行為。
⚠️ 注意:本範例採用最基礎的 ADC Polling 與 UART Blocking 模式。在實際專案中,這種方式會導致 CPU 進入等待狀態而造成效能低落。建議一般可使用 Interrupt 模式,甚至大量資料傳輸時使用 DMA 模式,解放 CPU。
U8 Polling_ADC_Measurement(float *voltage, U8 timeout) {
if (voltage == NULL) return HAL_ERROR; // avoid null reference
U8 ret;
ret = HAL_ADC_Start(&hadc1);
if (ret != HAL_OK) {return ret;}
// timeout (ms)
ret = HAL_ADC_PollForConversion(&hadc1, timeout);
if (ret == HAL_OK) {
U32 adc_val = HAL_ADC_GetValue(&hadc1);
// Vref = 3.3V, Resolution = 12B
*voltage = ((float)adc_val * 3.3f) / 4095.0f;
}
HAL_ADC_Stop(&hadc1);
return ret;
}
U8 Blocking_UART_Transmit(U8 timeout, const char * format, ... ) {
U8 ret;
char msg[64];
va_list marker;
va_start(marker, format);
U16 len = vsnprintf(msg, sizeof(msg), format, marker);
va_end(marker);
if (len > 0) {
// (sizeof(msg) - 1) avoid overflow, the last always '\0'
U16 send_len = (len < sizeof(msg)) ? len : (U16)(sizeof(msg) - 1);
ret = HAL_UART_Transmit(&huart3, (PU8)msg, send_len, timeout);
} else {
ret = HAL_ERROR;
}
return ret;
}
void pa3_hi(void) {
HAL_GPIO_WritePin(GPIOA, GPIO_PIN_3, GPIO_PIN_SET);
}
void pa3_lo(void) {
HAL_GPIO_WritePin(GPIOA, GPIO_PIN_3, GPIO_PIN_RESET);
}
int main(void)
{
TM_Init();
while (1)
{
float curr_voltage = 0;
if (Polling_ADC_Measurement(&curr_voltage, 10) == HAL_OK) {
pa3_hi();
Blocking_UART_Transmit(100, "Voltage: %.2fV\n", curr_voltage);
}
pa3_lo();
TM_Delay_MS(10);
}
}
📐 ADC 數值換算邏輯
由於 ADC 回傳的是數位量化值,我們需要透過參考電壓比例換算回實際電壓:
\[\frac{V_{input}}{V_{reference}} = \frac{ADC_{val}}{ADC_{max}}\]已知前面 ADC 設定時解析度為 12 bits,且參考電壓是工作電壓 3.3V,因此換算公式如下:
\[V_{input} = \frac{ADC_{val} * V_{reference}}{ADC_{max}} = \frac{ADC_{val} * 3.3}{2^{12} -1} = \frac{ADC_{val} * 3.3}{4095}\]🔍 波形驗證
1. 整體週期觀察 從 Overview 波形可以看到,大約每 10ms PA3 會拉高一次,隨即 TX 引腳開始輸出資料。這驗證了我們主迴圈的延時邏輯:先執行 ADC 採樣,隨後立即進行 UART 傳送。

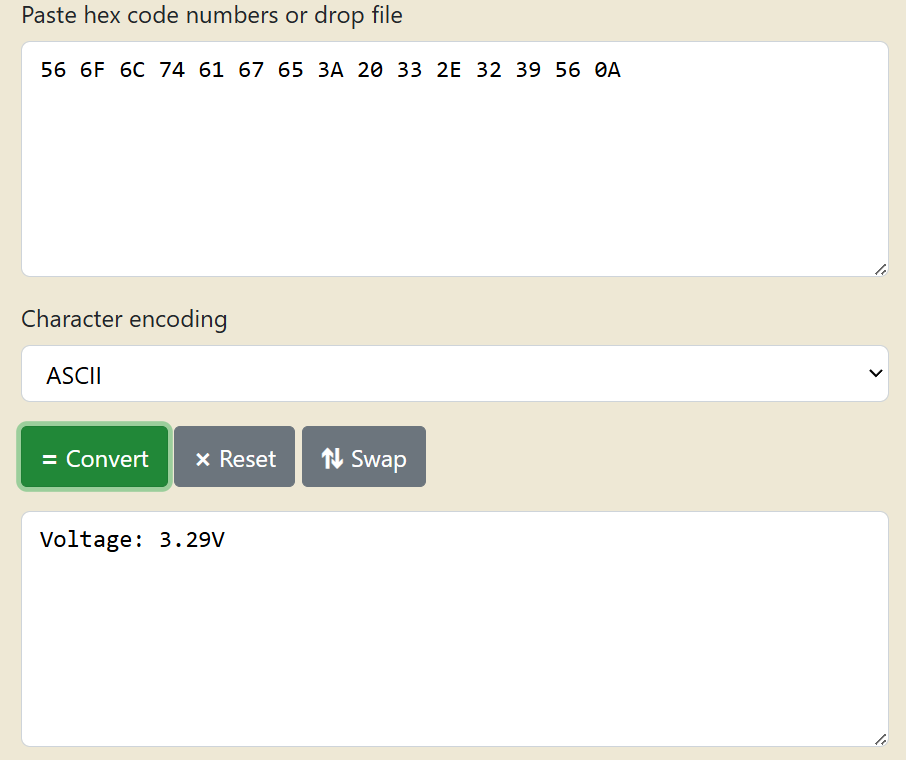
2. 資料內容驗證
解碼 TX 訊號後的 String 結果顯示為 "Voltage: 3.29V\n"。這是因為我們將 3.3V 短路接到 PA0 供 ADC 量測。
3. UART 時序分析 (Baud Rate 驗證) 放大觀察單個 Bit 的持續時間約為 8.6~8.7 us。 這與我們在 CubeMX 中設定的 BaudRate 115200 極為接近,誤差在容許範圍內。
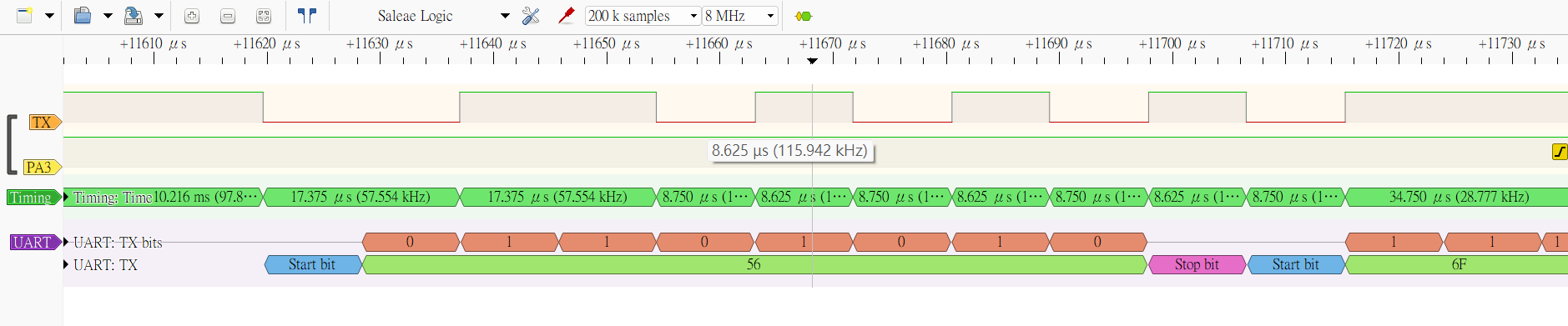
此外,從波形可觀察到標準的 UART 協定:
- Start Bit:TX 由高電位變為低電位(LO)代表資料開始。
- Data Bits:以 Byte 為基本單位,每 8 bits 為一組進行傳送。
📝 八、 結語
由於這是第一次嘗試使用 CubeMX,完全從零開始建立與實作 STM32 專案,其中許多細節和踩過的坑,我會想要記錄下來供未來自己參考,因此通篇下來顯得瑣碎,還請見諒。